Arten von WinkelpositionsSensoren
WinkelpositionsSensoren sind Geräte, die den Drehwinkel eines Objekts messen, wie z. B. eines Lenkrads oder eines Robotergelenks. Sie helfen zu erkennen, wie stark sich etwas gedreht hat und in welche Richtung. Diese Sensoren sind entscheidend für die Bereitstellung einer genauen Positionsrückmeldung in verschiedenen Anwendungen und sorgen so für optimale Leistung und Sicherheit. Je nach der Technologie, die zum Erfassen des Winkels des Sensors verwendet wird, gibt es verschiedene Arten von WinkelpositionsSensoren.
-
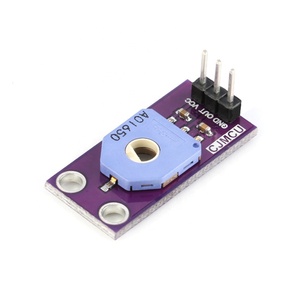
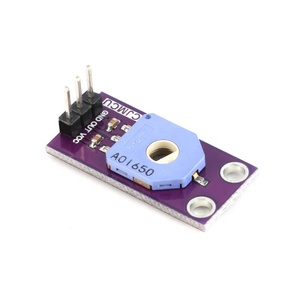
Potentiometer-WinkelpositionsSensoren:
Dies sind die häufigsten und einfachsten Arten von WinkelpositionsSensoren. Sie verwenden einen variablen Widerstand, genannt Potentiometer, um Spannungsänderungen zu messen, wenn sich ein Objekt bewegt. Die sich ändernde Spannung zeigt an, wie weit oder in welche Richtung sich das Objekt gedreht hat. Es gibt drei Haupttypen von Potentiometer-WinkelpositionsSensoren. Drehpotentiometer sind die gebräuchlichste Art von WinkelpositionsSensoren. Sie verwenden einen drehenden, leitfähigen Schleifer, um den Widerstand zu ändern und Drehwinkel zu messen. Lineare Potentiometer haben einen gleitenden Schleifer, der den Widerstand entlang eines geraden Wegs ändert, um lineare Verschiebungswinkel zu messen. Die dritte Art sind Mehrumdrehungs- oder hochauflösende Potentiometer, die größere Winkel messen oder eine feinere Auflösung bieten können, indem sie mehrere oder höhere Widerstandselemente verwenden.
-
Hall-Effekt-WinkelpositionsSensoren:
Diese WinkelpositionsSensoren verwenden Magnetfelder und den Hall-Effekt, um die Drehung zu messen. Sie haben einen Magneten, der am rotierenden Teil befestigt ist, und einen Sensorchip, der Änderungen im Magnetfeld erfasst, wenn er sich bewegt. Der Sensorchip wandelt diese Änderungen in ein elektrisches Signal um, das den Winkel angibt. Es gibt zwei Haupttypen von Hall-Effekt-WinkelpositionsSensoren. Lineare Hall-Effekt-Sensoren geben eine Spannung aus, die proportional zur Magnetfeldstärke ist. Sie messen den Winkel anhand der Entfernung vom Magneten. Schalt-Hall-Effekt-Sensoren dagegen erkennen nur das Vorhandensein oder Nichtvorhandensein eines Magnetfelds. Sie werden für Anwendungen wie Endschalter verwendet, bei denen eine Ein-/Ausschaltsensorik erforderlich ist.
-
Kapazitive WinkelpositionsSensoren:
Diese Sensoren messen Kapazitätsänderungen zwischen leitenden Platten, wenn sich ein Objekt dreht. Die variierende Kapazität zeigt den Drehwinkel an. Es gibt zwei Haupttypen von kapazitiven WinkelpositionsSensoren. Die erste Art sind variable Kapazitätssensoren, die leitende Platten haben, deren Abstand durch die Drehung verändert wird, wodurch sich die Kapazität ändert. Die zweite Art sind differentielle Kapazitätssensoren, die zwei Plattenpaare haben. Ihre Drehung bewirkt gleiche, aber entgegengesetzte Kapazitätsänderungen, wodurch die Empfindlichkeit gegenüber Winkelvariationen verbessert wird.
-
Induktive WinkelpositionsSensoren:
Diese Sensoren verwenden Spulen und sich ändernde Magnetfelder, um Winkel zu messen. Sie haben zwei Spulen, und das Magnetfeld einer Spule ändert sich, wenn sich die andere Spule dreht. Die sich ändernde magnetische Kopplung zwischen den Spulen zeigt den Drehwinkel an. Es gibt zwei Haupttypen von induktiven WinkelpositionsSensoren. Die erste Art sind variable Induktanzsensoren, die einen Kern haben, dessen Position in den Spulen sich mit der Drehung ändert, wodurch sich die Induktanz ändert. Die zweite Art sind differentielle Induktanzsensoren, die zwei Spulen haben, deren Induktanz sich bei der Drehung in entgegengesetzter Richtung ändert, wodurch die Empfindlichkeit gegenüber Winkelvariationen verbessert wird.
Spezifikation und Wartung von WinkelpositionsSensoren
Jeder WinkelpositionsSensor hat seine eigenen Spezifikationen, die seine Leistung bestimmen. Hier sind einige davon:
-
Sensing-Element
Das Sensing-Element eines WinkelpositionsSensors misst den Winkel der Welle oder des Objekts in Bewegung. Es wandelt die mechanische Bewegung in ein elektrisches Signal um. Das Sensing-Element kann ein Widerstandselement, ein magnetostriktives Element oder ein Halbleiter sein. Das im WinkelpositionsSensor verwendete Sensing-Element bestimmt die Genauigkeit, Auflösung und Empfindlichkeit des Sensors.
-
Ausgangssignal
Das Ausgangssignal eines WinkelpositionsSensors ist das Signal, das vom Sensing-Element erzeugt wird. Das Ausgangssignal wird verwendet, um mit anderen Systemen oder Geräten zu kommunizieren. Das Ausgangssignal kann ein analoges Signal, ein digitales Signal oder ein PWM-Signal sein. Das Ausgangssignal des WinkelpositionsSensors bestimmt die Kompatibilität mit anderen Systemen und Geräten und bestimmt die Ansprechgeschwindigkeit.
-
Elektrische Versorgung
Die elektrische Versorgung eines WinkelpositionsSensors versorgt den Sensor mit Strom. Die elektrische Versorgung kann eine DC-Spannung oder eine AC-Spannung sein. Die elektrische Versorgung eines WinkelpositionsSensors bestimmt den Stromverbrauch und das elektrische Rauschen.
-
Messbereich
Der Messbereich eines WinkelpositionsSensors ist der Bereich der Winkel, die der Sensor messen kann. Der Messbereich wird in Grad angegeben. Der Messbereich eines WinkelpositionsSensors bestimmt die Anwendungen und die Winkelauflösung.
-
Hysterese
Die Hysterese eines WinkelpositionsSensors ist die Differenz zwischen dem gemessenen Winkel und dem tatsächlichen Winkel. Die Hysterese wird als Prozentsatz des Messbereichs angegeben. Die Hysterese eines WinkelpositionsSensors bestimmt die Genauigkeit und die Wiederholgenauigkeit.
-
Nichtlinearität
Die Nichtlinearität eines WinkelpositionsSensors ist die Abweichung des Ausgangssignals vom erwarteten Ausgangssignal. Die Nichtlinearität eines WinkelpositionsSensors beeinflusst die Genauigkeit und Präzision.
Es ist wichtig, WinkelpositionsSensoren zu warten, damit sie ordnungsgemäß funktionieren. Hier sind einige Tipps:
- Überprüfen Sie die Sensoren regelmäßig, um sicherzustellen, dass sie keine Schäden aufweisen.
- Reinigen Sie die Sensoren, um die Ansammlung von Schmutz und Ablagerungen zu vermeiden.
- Überprüfen Sie die elektrische Verbindung der Sensoren, um sicherzustellen, dass sie sicher sind.
- Kalibrieren Sie die Sensoren regelmäßig, um ihre Genauigkeit zu erhalten.
- Ersetzen Sie abgenutzte oder beschädigte Komponenten der Sensoren.
So wählen Sie einen WinkelpositionsSensor aus
Wenn Sie einen WinkelpositionsSensor für ein Projekt oder eine Anwendung auswählen, sollten Sie Folgendes berücksichtigen:
- Sensortechnologie: Verschiedene Technologien erfassen Winkel auf unterschiedliche Weise. Wie bereits erwähnt, gibt es Kontakt- und berührungslose Sensoren. Erstere verwenden Reibung, um Winkel zu erfassen, während letztere magnetische oder optische Verfahren verwenden. Berührungslose Sensoren sind beliebter, da sie gegenüber Kontaktsensoren mehrere Vorteile haben, wie z. B. eine höhere Haltbarkeit.
- Eingangsspannung und Stromverbrauch: Wählen Sie einen Sensor, dessen Eingangsspannung mit der des vorhandenen Systems übereinstimmt. Berücksichtigen Sie auch den Stromverbrauch des Sensors. Wenn das System für den Einsatz mit geringer Leistung ausgelegt ist, ist ein Sensor mit geringem Stromverbrauch ideal.
- Ausgangssignal: Das Ausgangssignal des WinkelpositionsSensors muss mit dem System kompatibel sein, an das er angeschlossen ist. Gängige Ausgangssignale sind analoge Spannung, Strom oder digitale Protokolle.
- Messbereich: Der Messbereich ist der maximale und minimale Winkel, den der Sensor erfassen kann. Ein Sensor mit einem größeren Messbereich ist vielseitiger. Der Messbereich sollte jedoch für die jeweilige Anwendung geeignet sein.
- Auflösung und Genauigkeit: Ein WinkelpositionsSensor mit hoher Auflösung hat eine bessere Messgenauigkeit, Präzision und Wiederholgenauigkeit. Solche Sensoren eignen sich für Anwendungen, die eine feine Steuerung und Präzision erfordern.
- Umweltbedingungen: Wählen Sie einen WinkelpositionsSensor, der Umgebungsbedingungen wie Feuchtigkeit, Staub, extreme Temperaturen und die Exposition gegenüber Chemikalien oder Vibrationen standhält. Sensoren, die für den Einsatz in rauen Umgebungen ausgelegt sind, haben schützende Gehäuse und Beschichtungen.
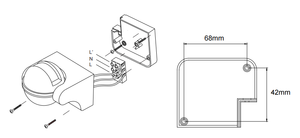
- Montage und Größe: Berücksichtigen Sie den verfügbaren Platz für den Sensor und seine Montagemöglichkeiten. Es ist ratsam, einen WinkelpositionsSensor zu wählen, der einfach zu montieren ist und kompakt genug ist, um in den verfügbaren Platz zu passen.
- Hysterese und Totband: Totband ist der Fehlerbereich, in dem sich ein Ausgang nicht ändert, während Hysterese die Differenz zwischen dem Ausgang für steigenden und sinkenden Eingang ist. Für Anwendungen, die eine hohe Präzision erfordern, ist es wichtig, einen WinkelpositionsSensor mit minimaler Hysterese und Totband zu wählen.
- Kosten: Wie jedes andere Produkt gibt es WinkelpositionsSensoren in verschiedenen Preisklassen, die von verschiedenen Faktoren abhängen, wie z. B. der Art und der Technologie, die verwendet wird. Daher ist es wichtig, ein Budget festzulegen, bevor Sie einen WinkelpositionsSensor kaufen. Stellen Sie jedoch sicher, dass der gewählte Sensor die Projektanforderungen erfüllt.
So bauen Sie einen WinkelpositionsSensor selbst ein und tauschen ihn aus
Wenn Sie einen WinkelpositionsSensor selbst einbauen und austauschen, ist es sehr wichtig, die richtigen Werkzeuge und grundlegende mechanische Kenntnisse zu haben. Im Folgenden finden Sie die Schritte zum Selbsteinbau und Austausch eines WinkelpositionsSensors:
Benötigte Werkzeuge
- Steckschlüssel-Satz
- Schlüssel-Satz
- Schraubendreher
- Torx-Bits
- Multimeter
- Neuer WinkelpositionsSensor
- Elektrische Steckerfett
Schritt-für-Schritt-Anleitung
- Identifizieren Sie die Position des WinkelpositionsSensors im Fahrzeug.
- Entfernen Sie alle Abdeckungen oder Schilde, die den Sensor möglicherweise schützen.
- Verwenden Sie die entsprechenden Werkzeuge, um die Schrauben oder Muttern zu entfernen, die den Sensor halten.
- Ziehen Sie den Sensor vorsichtig von seinem Montageort ab.
- Trennen Sie den elektrischen Stecker, indem Sie die Entriegelungslasche drücken und ihn auseinanderziehen.
- Tragen Sie eine kleine Menge elektrisches Steckerfett auf die Stifte des neuen Sensors auf.
- Schließen Sie den elektrischen Stecker an den neuen Sensor an und stellen Sie sicher, dass er vollständig sitzt.
- Montieren Sie den neuen Sensor mit Schrauben oder Muttern an seiner vorgesehenen Stelle.
- Bringen Sie alle entfernten Abdeckungen oder Schilde wieder an.
- Starten Sie das Fahrzeug und verwenden Sie ein Diagnosegerät, um zu überprüfen, ob der neue Sensor ordnungsgemäß funktioniert.
F & A
F1: Wo wird der WinkelpositionsSensor eingesetzt?
A1: Die Sensoren werden in verschiedenen Anwendungen eingesetzt, um die Winkelposition einer rotierenden Komponente zu erkennen. Dazu gehört ihr Einsatz in der Robotik, in Kraftfahrzeugsystemen wie Lenkung und Drosselklappensteuerung, in industriellen Maschinen, Servomotoren, in der Kameraobjektivfokussierung und in Luft- und Raumfahrtsystemen.
F2: Was ist das Funktionsprinzip des WinkelpositionsSensors?
A2: Der WinkelpositionsSensor misst den Drehwinkel einer Welle oder Komponente. Wenn sich eine Komponente dreht, erfasst der Sensor seine Winkelposition und wandelt diese Information in ein elektrisches Signal um. Dieses elektrische Signal wird dann verwendet, um den Drehwinkel zu bestimmen und wird an ein Steuerungssystem zur Interpretation und Aktion übertragen.
F3: Welche verschiedenen Arten von WinkelpositionsSensoren gibt es?
A3: Es gibt verschiedene Arten von WinkelpositionsSensoren, darunter Potentiometer-Sensoren, Hall-Effekt-Sensoren, Magnetsensoren, Kapazitätssensoren und optische Sensoren. Jeder Typ verwendet eine andere Technologie, um die Winkelposition zu messen, wodurch sie für verschiedene Anwendungen geeignet sind und Optionen bieten, die von den jeweiligen Anforderungen abhängen.
F4: Welche Merkmale hat der WinkelpositionsSensor?
A4: WinkelpositionsSensoren haben mehrere Merkmale, darunter hohe Präzision und Auflösung, großen Messbereich, Robustheit und Haltbarkeit, schnelle Ansprechzeiten und Kompatibilität mit verschiedenen Ausgangssignalen. Je nach Sensortyp verfügen einige auch über Selbstdiagnosefunktionen und sind programmierbar, um bestimmte Anforderungen zu erfüllen.
F5: Sind WinkelpositionsSensoren für den Einsatz in rauen Umgebungen geeignet?
A5: Ja, WinkelpositionsSensoren können so konzipiert werden, dass sie für raue Umgebungen geeignet sind. Merkmale wie robuste Gehäuse, Schutz vor Staub und Feuchtigkeit (z. B. IP-Schutzarten) und extreme Temperaturen können integriert werden. Die Auswahl von Sensoren, die speziell für anspruchsvolle Bedingungen entwickelt wurden, ist entscheidend, um eine zuverlässige Leistung zu gewährleisten.





























































































































































































































 浙公网安备 33010002000092号
浙公网安备 33010002000092号 浙B2-20120091-4
浙B2-20120091-4