Arten von Roboter-Mechanischen Greifern
Robotergreifer sind so konzipiert, dass sie eine menschliche Hand nachahmen und die gleichen Funktionen mit der gleichen Geschicklichkeit und Präzision ausführen können. Sie gibt es in verschiedenen Arten:
-
Biomimetische Greifer
Biomimetische Robotergreifer sind so konzipiert, dass sie wie Lebewesen funktionieren. Diese Greifer verwenden oft weiche Materialien und flexible Gelenke, um die Anpassungsfähigkeit und Wendigkeit organischer Finger nachzuahmen. Beispielsweise können biomimetische Greifer von Tieranhängen, einschließlich Vogelfedern oder Krakenarmen, inspiriert sein, und Strukturen verwenden, die sich biegen und um Objekte wickeln können. Dies ermöglicht es ihnen, Dinge sicher und bequem zu greifen. Einige biomimetische Greifer verfügen auch über sensorische Systeme, die es ihnen ermöglichen, Objektformen, -größen und -texturen zu unterscheiden. Dies hilft ihnen, ihren Griff entsprechend anzupassen. So können sie zum Beispiel zerbrechliche Gegenstände leicht halten, aber schwerere Gegenstände sicher greifen. Durch die Nachahmung biologischer Organismen erreichen diese Robotergreifer ein hohes Maß an Vielseitigkeit und Präzision bei Manipulationsaufgaben.
-
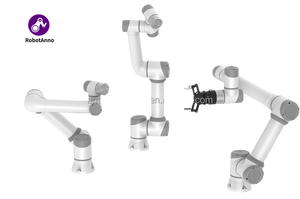
Modulare Greifer
Modulare Robotergreifer bestehen aus austauschbaren Modulen oder Komponenten. Dies ermöglicht eine einfache Anpassung und Skalierbarkeit an verschiedene Anwendungen. Jedes Modul verfügt in der Regel über einen eigenen Aktuator, Sensor und Steuerelektronik. Dies ermöglicht ihm, bestimmte Manipulationsaufgaben auszuführen. So kann ein Modul beispielsweise Finger haben, die für zarte Aufgaben wie Pick-and-Place-Operationen optimiert sind. Ein anderes Modul kann über motorisierte Finger verfügen, die für den Umgang mit schwereren Gegenständen ausgelegt sind. Die Leistung des Greifers kann durch Hinzufügen oder Ersetzen von Modulen an unterschiedliche Bedürfnisse angepasst werden.
-
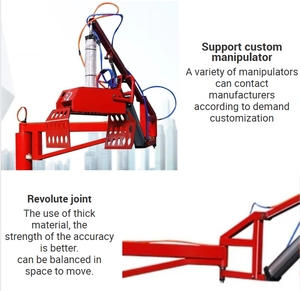
Universale Gelenke
Robotergreifer mit universalen Gelenken verwenden ein einfaches, aber effektives Design, das auf universellen Gelenken basiert. Diese Gelenke ermöglichen es den Fingern des Greifers, sich in mehrere Richtungen zu bewegen und so einen großen Bewegungsumfang zu bieten. In der Regel hat ein Robotergreifer mit universellen Gelenken ein bis drei Finger pro Greifarm. Jeder Finger ist über Universalgelenke mit den anderen verbunden, so dass er sich frei biegen und drehen kann. Obwohl dieses Design im Vergleich zu komplexeren Robotergreifern einfach ist, verleiht es dem Greifer eine vielseitige Bewegungsfähigkeit. Die Anordnung der Universalgelenke ermöglicht es dem Robotergreifer, die natürliche Bewegung biologischer Finger zu approximieren, so dass er Objekte mit unterschiedlichen Formen und Größen greifen und manipulieren kann.
-
Triple Modular Discretionary Method
TMDS oder die Triple Modular Discretionary Method wurde von der NASA vorgestellt und wird in der Regel bei Weltraummissionen eingesetzt. TMDS-Robotergreifer haben in der Regel drei Finger, und jeder Finger hat drei Gelenke, genau wie ein menschlicher Finger. TMDS-Greifer zeichnen sich durch hohe Flexibilität und Geschicklichkeit aus und eignen sich für komplexe Manipulationsaufgaben.
Spezifikationen & Wartung
-
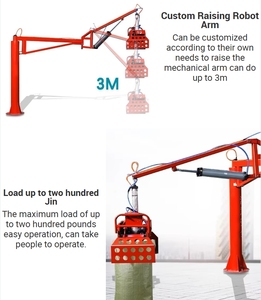
Tragfähigkeit:
Das maximale Gewicht, das ein Robotergreifer tragen kann, wird als Tragfähigkeit bezeichnet. Diese Tragfähigkeit muss bei der Auswahl eines Greifers für eine Aufgabe berücksichtigt werden, da sie das Gewicht der Objekte beeinflusst, die er greifen und manipulieren kann.
-
Anzahl der Finger:
Robotergreifer verfügen wie menschliche Hände über Finger, die das Greifen von Objekten in verschiedenen Formen und Größen ermöglichen. Die typische Anzahl der Finger für mechanische Greifer liegt zwischen zwei und vier, wobei jedes Design Stabilität und Geschicklichkeit für die Greifbewegung bringt.
-
Fingerlänge:
Die Länge der Finger, die ihren Bewegungsumfang und ihre Greifkapazität bestimmt, ist ein wichtiger Bestandteil der Konstruktion von Robotergreifern. Die Fähigkeit eines Greifers, schwer zugängliche Stellen zu erreichen und mit kleinen Objekten zu interagieren, hängt von der Fingerlänge ab.
-
Material:
Mechanische Greifer werden aus einer Vielzahl von Materialien hergestellt, die jeweils über einzigartige Eigenschaften verfügen. Aufgrund seines außergewöhnlichen Verhältnisses von Festigkeit zu Gewicht und seiner Langlebigkeit wird häufig leichtes Aluminium verwendet, ebenso wie feste Kunststoffe, um eine einfache und flexible Wahl für Anwendungen mit geringer Reibung zu bieten.
-
Sensoren:
Robotergreifer können mit einer Vielzahl von Sensoren ausgestattet werden, darunter Drucksensoren, Tastsensoren und Kraftsensoren. Diese Sensoren liefern dem Greifer Feedback über seine Umgebung, so dass er seine Bewegungen und seinen Griff bei Bedarf anpassen kann.
Wartung
-
Reinigung:
Die regelmäßige Reinigung mechanischer Greifer ist unerlässlich, um Schmutz, Staub und Fremdkörper zu entfernen. Für die Reinigung der empfindlichen Bauteile des Greifers sollten eine weiche Bürste und Seifenwasser verwendet werden, um das Eindringen von Feuchtigkeit in die elektrischen Teile zu verhindern.
-
Schmierung:
Um mechanische Greifer in gutem Zustand zu halten, müssen die Gelenke und beweglichen Teile regelmäßig geschmiert werden. Dies reduziert Verschleiß und Betriebsgeräusche und sorgt für einen reibungslosen Lauf, indem das Schmiermittel gemäß den Anweisungen des Herstellers aufgetragen wird.
-
Inspektion:
Regelmäßige Inspektionen sollten durchgeführt werden, um Probleme wie Verschleiß von Bauteilen, lose Verbindungen und beschädigte Teile frühzeitig zu erkennen. Durch die schnelle Behebung dieser Probleme kann die Leistung des Greifers erhalten werden.
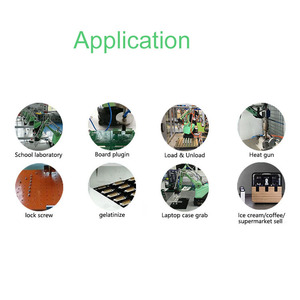
Einsatzgebiete und Anwendungen von Roboter-Mechanischen Greifern
Robotergreifer haben eine breite Palette von Einsatzmöglichkeiten in verschiedenen Sektoren. Ihre Fähigkeit, menschenähnliche Bewegungen nachzuahmen, macht sie ideal für Aufgaben, die präzises Handling erfordern. Hier sind einige gängige Anwendungen, bei denen mechanische Robotergreifer-Prototypen eingesetzt werden.
-
Industrielle SCARA-Roboter
SCARA (Selective Compliance Articulated Robot Arms) werden typischerweise in industriellen Montagelinien eingesetzt, z. B. in der Automobilproduktion, wo sie mechanische Greifer für Aufgaben wie Schweißen und präzisen Zusammenbau verwenden. Ihre Geschwindigkeit, Flexibilität und Präzision können die Effizienz und Qualitätskontrolle verbessern.
-
Lebensmittelverarbeitung und -verpackung
Robotergreifer werden jetzt verwendet, um Lebensmittel wie zarte Backwaren zu picken und zu platzieren. Sie können auch zum Sortieren verpackter Waren eingesetzt werden. So können sie beispielsweise gekühlte Artikel, Tiefkühlkost und Produkte einfach und sicher handhaben, da sie mit Sensoren ausgestattet werden können, um eine korrekte Handhabung zu gewährleisten.
-
Medizinische Robotik
Robotergreifer können sensible Operationen und empfindliche medizinische Verfahren ermöglichen, wie z. B. minimal-invasive Operationen, Physiotherapie und Rehabilitation. Sie führen Pods mit verletzten oder behinderten Patienten, Prothesen und automatisierten Medikamentenausgabesystemen aus. Ihre Präzision und schonende Handhabung machen sie für diese Aufgaben geeignet.
-
Exploration und Fernsteuerung
Robotergreifer ermöglichen es Wissenschaftlern und Forschern, entlegene und feindliche Umgebungen mit Kontrolle zu erforschen, wie z. B. Weltraumforschung, Unterwasserforschung, Umgang mit Gefahrstoffen sowie Such- und Rettungseinsätze. Ihre Anpassungsfähigkeit an unterschiedliche Gelände und Bedingungen macht sie für diese Missionen wertvoll.
-
Bildung und Forschung
Robotergreifer spielen eine entscheidende Rolle in der pädagogischen Robotik und Forschung. Sie werden in Schulen, Universitäten und Forschungslaboren eingesetzt, um Robotik-Konzepte zu lehren, Experimente durchzuführen und neue Technologien zu entwickeln. Ihre Vielseitigkeit und programmierbare Natur machen sie ideal für praktisches Lernen und Exploration.
So wählen Sie Roboter-Mechanische Greifer aus
-
Analyse der funktionalen Anforderungen:
Bestimmen Sie zunächst den Zweck des Robotergreifers. Interaktion, Picken oder andere spezifische Bedürfnisse können die Wahl der Größe, Form und Stärke beeinflussen. Wenn es sich beispielsweise um zerbrechliche Gegenstände handelt, kann ein Designer die Verwendung eines dreifingrigen Robotergreifers bevorzugen.
-
Abgleich mit der Umgebung:
Die Umgebung, in der der Roboter arbeitet, wird auch die Wahl des Greifers beeinflussen. Wenn der Greifer unter Wasser oder bei hohen Temperaturen arbeiten muss, dann erfordert die Auswahl der Materialien etwas wie einen antistatischen Robotergreifer.
-
Kompatibilität des Steuerungssystems:
Stellen Sie sicher, dass der gewählte mechanische Greifer mit dem Steuerungssystem des Roboters kompatibel ist. Dazu gehört auch die Berücksichtigung der Kommunikationsprotokolle und Steueralgorithmen, um eine nahtlose Integration und Funktionalität zu gewährleisten.
-
Ergonomie und Benutzererfahrung:
Wenn der mechanische Greifer des Roboters in einem interaktiven Kontext verwendet wird, z. B. bei sozialen oder Servicerobotern, sollten Designer die Ergonomie und Ästhetik des Greifers berücksichtigen. Ein Design, das menschliche Hände nachahmt und freundlich aussieht, kann die Benutzerakzeptanz und die emotionale Verbindung verbessern.
-
Kosten und Lieferung:
Berücksichtigen Sie schließlich die Budgetbeschränkungen und die Verfügbarkeit des mechanischen Greifers. Berücksichtigen Sie den Kompromiss zwischen Leistung und Kosten, um eine wirtschaftlich sinnvolle Wahl für das jeweilige Anwendungsszenario zu treffen.
Roboter-Mechanische Greifer Q&A
F1: Aus welchen Materialien besteht ein Robotergreifarm?
A1: Robotergreifer werden in der Regel entweder aus Leichtmetallen oder hochfesten technischen Kunststoffen hergestellt. Zu den Leichtmetallen gehören Aluminium- und Magnesiumlegierungen. Sie verleihen den Greifern eine solide Struktur und halten sie gleichzeitig leicht. Technische Kunststoffe wie Nylon sind bekannt für ihre Langlebigkeit und Festigkeit. Dies macht sie für Anwendungen geeignet, die Stoßfestigkeit und hohe Temperaturen erfordern.
F2: Wie nehmen Robotergreifer Objekte auf?
A2: Der Robotergreifermechanismus wird gesteuert, um Griffe mit unterschiedlicher Stärke anzuwenden. Die Greifkraft wird über die Berührungssensoren des Roboters und KI-Algorithmen geregelt. Die Sensoren können Objektgrößen, -gewichte und -zerbrechlichkeit erkennen. Die Greifer werden dann programmiert, um den Griff entsprechend anzupassen. Daher können Roboter zerbrechliche Gegenstände vorsichtig aufnehmen und die optimale Greifkraft auf schwerere Gegenstände anwenden.
F3: Können Robotergreifer menschliche Handbewegungen nachbilden?
A3: Ja, fortschrittliche Robotergreifer können die Beugung und Koordination menschlicher Finger nachahmen. Diese Greifer sind mit mehreren Gelenken ausgestattet und werden von präzisen Motoren angetrieben. In Kombination mit künstlicher Intelligenz können die Greifer verschiedene menschliche Aktivitäten lernen und nachbilden.
F4: Was sind die Einschränkungen von Robotergreifern?
A4: Robotergreifer haben trotz technologischer Fortschritte immer noch Einschränkungen. Zu den Grenzen gehören der Bewegungsumfang, die Empfindlichkeit und das Feedback, die Anpassungsfähigkeit und die Greifkraft. Robotergreifer haben in der Regel eine angepasste Version der Feinmotorik der menschlichen Hand. Zwar können sie einige Bewegungen nachahmen, aber sie verfügen möglicherweise nicht über die komplizierte Manövrierfähigkeit menschlicher Finger. Darüber hinaus sind viele Robotergreifer so programmiert, dass sie die menschliche Kraft nachahmen und sind auf voreingestellte Greifer beschränkt.


































































































































































































































 浙公网安备 33010002000092号
浙公网安备 33010002000092号 浙B2-20120091-4
浙B2-20120091-4