Arten von Hochpräzisionsgyroskopen
Bei hochpräzisen Gyroskopen gibt es eine Reihe von unterschiedlichen Optionen, die unterschiedlichen Bedürfnissen und Anforderungen gerecht werden. Dazu gehören:
-
Faseroptisches Gyroskop (FOG)
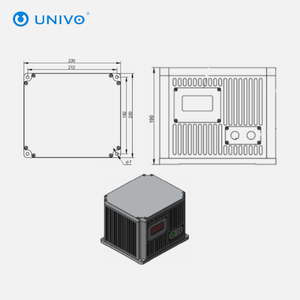
Ein faseroptisches Gyroskop ist ein Drehungssensor, der auf Lichtimpulsen basiert, die durch optische Fasern reisen, um Drehungen zu erkennen. Bei einer Drehung erfahren die beiden in entgegengesetzte Richtungen reisenden Lichtwellen aufgrund des Sagnac-Effekts eine Phasenverschiebung. Diese Phasenverschiebung kann gemessen werden und zur Bestimmung der Rotationsgeschwindigkeit verwendet werden. FOGs bieten mehrere Vorteile, darunter hohe Sensitivität, geringe Drift und Immunität gegen Umwelteinflüsse wie Temperatur und Vibration. Darüber hinaus sind sie Festkörpergeräte, was bedeutet, dass sie keine beweglichen Teile haben, was zu ihrer Robustheit und Zuverlässigkeit beiträgt. Diese Gyroskope sind besonders gut geeignet für Anwendungen, die präzise und stabile Messungen über längere Zeiträume erfordern, wie z.B. inertiale Navigationssysteme für Flugzeuge, Schiffe und Raumfahrzeuge sowie zur Positionierung in der Öl- und Gaserkundung und bei seismischen Untersuchungen.
-
Vibrationsstruktur-Gyroskop (VSG)
Ein Vibrationsstruktur-Gyroskop (VSG) ist eine Art gyroskopischer Sensor, der die Winkelgeschwindigkeit oder Rotation erkennt und misst. Es arbeitet mit einer vibrierenden Struktur, deren Oszillation durch Rotation beeinflusst wird. Das Prinzip dieses Gyroskops basiert auf dem Coriolis-Effekt. Wenn die Struktur rotiert, verursacht die Coriolis-Kraft eine Verschiebung der Vibrationsachse, die gemessen werden kann, um die Rotationsgeschwindigkeit zu bestimmen. VSGs sind bekannt für ihre Sensitivität, Kompaktheit und die Fähigkeit, präzise Messungen mit minimaler Drift im Laufe der Zeit bereitzustellen. Da sie mikromechanische Systeme (MEMS) sind, haben sie außerdem keine beweglichen Teile im traditionellen Sinne, was sie haltbarer und weniger anfällig für mechanischen Verschleiß macht.
-
Gyroskop für Mikro-Elektro-Mechanische Systeme (MEMS)
Ein Gyroskop für Mikro-Elektro-Mechanische Systeme (MEMS) ist ein winziges Gerät, das die Winkelgeschwindigkeit oder Rotation erkennt und misst. Diese Gyroskope nutzen die Prinzipien von elektromechanischen Systemen, um Rotationsbewegungen zu erfassen. Sie arbeiten, indem sie die Coriolis-Kraft erkennen, die auf eine mikro-skalierten vibrierenden Struktur wirkt, wenn sie einer Rotation ausgesetzt ist. Diese Kraft verursacht eine Verschiebung in der Frequenz des vibrierenden Elements, die gemessen werden kann, um die Rotationsgeschwindigkeit um verschiedene Achsen zu bestimmen. Sie werden in einer Vielzahl von Anwendungen eingesetzt, darunter Unterhaltungselektronik, Systeme zur Stabilitätskontrolle im Automobilbereich, Luftfahrt-Navigation und Robotik, wo kompakte Größe, geringer Stromverbrauch und Zuverlässigkeit entscheidend sind.
Szenarien für Hochpräzisionsgyroskope
Hochpräzisionsgyroskope sind vielseitige Werkzeuge, die in verschiedenen Branchen und Anwendungen eingesetzt werden, in denen genaue Messungen und Stabilisierung erforderlich sind. Hier sind einige wichtige Nutzungsszenarien:
- Luft- und Raumfahrt: Hochpräzisionsgyroskope sind grundlegend für Navigation, Lageregelung und Stabilisierung in Flugzeugen, Raumfahrzeugen und Drohnen. Sie helfen, Stabilität und Orientierung unter turbulenten Bedingungen und während komplexer Manöver aufrechtzuerhalten, was eine präzise Flugkontrolle und eine Erhöhung der Sicherheit ermöglicht.
- Marine Industrie: Auf Schiffen und U-Booten werden Gyroskope für inertiale Navigationssysteme (INS) und Stabiliser-Plattformen eingesetzt. Sie liefern genaue Kurs- und Orientierungsdaten, die für lange Reisen und Einsätze in abgelegenen oder schlecht kartierten Gewässern unerlässlich sind. Stabiliser-Plattformen helfen, die Orientierung des Schiffs aufrechtzuerhalten, verringern die Auswirkungen von Wellen und verbessern Komfort sowie Leistung.
- Automobilindustrie: Hochpräzisionsgyroskope verbessern die Stabilität, Kontrolle und Navigation von Fahrzeugen in fortschrittlichen Fahrerassistenzsystemen (ADAS) und autonomen Fahrzeugen. Sie werden in elektronischen Stabilitätskontrollen, Antiblockiersystemen (ABS) und Rollstabilitätskontrollen eingesetzt, um Abweichungen von der gewünschten Route zu erkennen und zu korrigieren, was die Sicherheit und Leistung verbessert.
- Robotik: Gyroskope werden in Robotersystemen für präzise Bewegungssteuerung, Navigation und Stabilisierung eingesetzt. Sie helfen, die Orientierung und Position in dynamischen Umgebungen aufrechtzuerhalten, was glatte und genaue Bewegungen in der Industrieautomatisierung, autonomen Robotern und Roboterarmen ermöglicht.
- Virtuelle Realität (VR) und Augmented Reality (AR): In VR- und AR-Geräten verfolgen Gyroskope Kopf- und Körperbewegungen, um Echtzeit-Orientierungs- und Positionsupdates zu ermöglichen. Dies schafft immersive und interaktive Erlebnisse, indem sichergestellt wird, dass virtuelle Bilder im physischen Raum verankert bleiben, was die Benutzererfahrung verbessert und Übelkeit reduziert.
- Geophysik und Erdwissenschaften: Hochpräzisionsgyroskope messen Rotationsphänomene wie die Erdrotation und Bewegungen der tektonischen Platten. Sie werden in der Geodäsie, Seismologie und Klimaforschung eingesetzt, um grundlegende Prozesse zu studieren, Veränderungen zu überwachen und Modelle des Erdsystems zu verbessern.
- Militär und Verteidigung: Hochpräzisionsgyroskope sind entscheidend für Navigations- und Leitsysteme in Raketen, Drohnen und Militärfahrzeugen. Sie liefern genaue und zuverlässige Daten in herausfordernden Umgebungen, in denen GPS-Signale möglicherweise störanfällig oder nicht verfügbar sind, und gewährleisten ein präzises Zielen und einen stabilen Betrieb.
- Gesundheitswesen und Medizinprodukte: In medizinischen Anwendungen können Gyroskope Bildgebungsgeräte stabilisieren und bei präzisen Messungen und Bewegungen in chirurgischen Verfahren helfen. Sie verbessern die Genauigkeit medizinischer Instrumente, verbessern die Patientenergebnisse und reduzieren das Risiko von Komplikationen bei heiklen Operationen.
Wie wählt man Hochpräzisionsgyroskope aus?
Die Auswahl des geeigneten Gyroskops für eine Anwendung erfordert die Berücksichtigung mehrerer technischer Aspekte. Hier sind die wichtigsten Faktoren, die berücksichtigt werden müssen:
-
Präzision und Sensitivität
Die Präzision eines Gyroskops ist seine Fähigkeit, Rotation genau zu messen. Sie wird normalerweise durch die Geräuschrate, die Verzerrungsinstabilität und die Empfindlichkeit des Skalierungsfaktors dargestellt. Für Anwendungen, die eine genaue langfristige Stabilität erfordern, wie z.B. die Navigation, ist es entscheidend, den erforderlichen Leistungsgrad für eine bestimmte Aufgabe zu bestimmen.
-
Messbereich
Gyroskope messen die Winkelgeschwindigkeit, und alle Typen haben einen Messbereich. Die Benutzer müssen die maximale erwartete Rotationsgeschwindigkeit in der Anwendung bestimmen, um sicherzustellen, dass das Gyroskop innerhalb seines Messbereichs arbeitet.
-
Stabilität
Es gibt zwei Stabilitätsarten zu berücksichtigen: kurz- und langfristige Stabilität. Die kurzfristige Stabilität ist entscheidend für dynamische Anwendungen, während die langfristige Stabilität für Anwendungen wie inertiale Navigationssysteme wichtig ist, bei denen die Genauigkeit über längere Zeiträume ohne externe Referenzen aufrechterhalten werden muss.
-
Integration mit anderen Systemen
Berücksichtigen Sie, wie das Gyroskop mit anderen Systemen und Komponenten integriert werden kann. Welche Art von Ausgang wird benötigt? Wie wird es mit anderen Sensoren und Verarbeitungseinheiten kommunizieren? Zum Beispiel muss ein Gyroskop in einem IMU nahtlos mit Beschleunigungsmessern und Magnetometern zusammenarbeiten.
-
Größe und Energieverbrauch
Für Anwendungen, die kompakte Lösungen erfordern, wie z.B. Drohnen oder tragbare Geräte, sind die Größe und der Stromverbrauch des Gyroskops kritische Faktoren. Kleinere Gyroskope mit geringerem Stromverbrauch sind in diesen Fällen vorzuziehen.
-
Kosten und Budgetbeschränkungen
Hochpräzisionsgyroskope haben unterschiedliche Kosten. Präzisere und stabilere Gyroskope sind teurer. Die Benutzer müssen ihre Leistungsanforderungen mit ihrem Budget in Einklang bringen, um eine optimale Lösung zu finden.
Funktion, Eigenschaften und Design von Hochpräzisionsgyroskopen
Hochpräzisionsgyroskope sind in verschiedenen Designs erhältlich, um den Anwendungsbedürfnissen unterschiedlicher Branchen gerecht zu werden. In Bezug auf die Funktion werden sie für Navigation, Stabilisierung, Bewegungserkennung und Steuerung verwendet. Außerdem verfügen sie über bestimmte Eigenschaften, die sie attraktiver machen und eine effiziente Leistung bieten. Diese Eigenschaften umfassen Genauigkeit, Stabilität, geringe Geräuschentwicklung, Temperatursensitivität, Kompaktheit und Skalierbarkeit.
Die Designs von Hochpräzisionsgyroskopen sind wie folgt:
-
Vibrationsmassengyroskope
Dieses Design basiert auf dem Prinzip der mechanischen Vibration. Es wird zur Erkennung der Winkelgeschwindigkeit verwendet. Dieses Design ist in der Automobilindustrie für elektronische Stabilitätskontroll- und Navigationssysteme nützlich. Es findet auch Anwendung in Unterhaltungselektronik, wie Smartphones und Drohnen.
-
Optische Gyroskope
Diese Gyroskope verwenden Licht zur Messung von Rotation. Sie sind für Navigationsanwendungen geeignet, bei denen eine langfristige Driftkompensation erforderlich ist. Dieses Design wird in der Luft- und Raumfahrt für inertiale Navigationssysteme eingesetzt. Es wird auch in autonomen Fahrzeugen und maritimen Anwendungen verwendet.
-
Quanten-Gyroskope
Diese basieren auf der Quantentechnologie. Sie bieten extrem präzise Messungen von Rotation. Dieses Design befindet sich noch in der Entwicklungsphase, zeigt aber Potenzial für zukünftige Navigationsanwendungen. Es kann für Anwendungen geeignet sein, die hohe Präzision erfordern, sich aber die Kosten für optische Gyroskope nicht leisten können.
-
Magnetische Gyroskope
Dieses Design nutzt Magnetfelder zur Erkennung von Rotation. Es ist nützlich für die Navigation in Anwendungen, bei denen keine mechanische Komponente benötigt wird. Dieses Design kann in der Raumfahrt, im Militär und in der Unterwasser-Navigation eingesetzt werden.
-
MEMS-Gyroskope
Micro-Elektromechanische Systeme (MEMS) sind klein, kostengünstig und werden häufig in der Unterhaltungselektronik für Bewegungserkennung eingesetzt. Sie finden auch Anwendung in der Automobilindustrie zur Stabilitätskontrolle und in Drohnen zur Flugstabilisierung.
Q&A
F1: Wie funktioniert ein hochpräzises Gyroskop?
A1: Ein hochpräzises Gyroskop erkennt und misst Rotation oder Winkelbewegung. Es funktioniert, indem es Änderungen in der Orientierung oder Winkelgeschwindigkeit identifiziert. Dies kann mit verschiedenen Technologien erfolgen, wie MEMS, Faseroptik oder Ringlaser. Die vom Gyroskop gesammelten Daten werden verwendet, um die aktuelle Orientierung des Objekts zu berechnen. Diese kann in verschiedenen Bereichen angewendet werden, wie z.B. in Navigationssystemen, der Luft- und Raumfahrt, der Robotik und der virtuellen Realität. Hochpräzisionsgyroskope bieten genaue und stabile Messungen, die für Anwendungen erforderlich sind, die präzise Bewegungserkennung und -steuerung erfordern.
F2: Was ist der Unterschied zwischen einem Gyroskop und einem IMU?
A2: Ein Gyroskop und ein IMU (Inertial Measurement Unit) sind verwandte, aber unterschiedliche Komponenten, die zur Messung von Bewegung und Orientierung verwendet werden. Ein Gyroskop misst die Winkelgeschwindigkeit oder die Rotationsrate um verschiedene Achsen. Es liefert Daten darüber, wie sich ein Objekt dreht. Ein IMU hingegen ist ein umfassenderes Gerät, das mehrere Sensoren umfasst, um die Bewegung und Orientierung eines Objekts zu messen. Ein IMU besteht typischerweise aus Beschleunigungsmessern, Magnetometern und Gyroskopen. Während ein Gyroskop nur die Rotation misst, bietet ein IMU ein vollständiges Bild der Bewegung eines Objekts, indem es Beschleunigung, Rotation und Magnetfelder misst.
F3: Was verursacht die Drift eines Gyroskops?
A3: Die Drift eines Gyroskops wird durch verschiedene Faktoren verursacht, darunter Temperaturänderungen, mechanische Vibrationen und das Altern der Sensorkomponenten. Drift bezieht sich auf die allmähliche Ansammlung von Fehlern in den Messungen des Gyroskops im Laufe der Zeit. Sie wird oft von Umweltbedingungen und dem inhärenten Rauschen beeinflusst, das in den Sensordaten vorhanden ist. Kalibrierungsfehler, wie falsche Anfangseinstellungen oder Ungenauigkeiten bei der Kompensation von Temperatureffekten, können ebenfalls zur Drift beitragen. Darüber hinaus können äußere Kräfte oder Störungen, die das Gyroskop beeinflussen, zu Drift führen, indem sie falsche Signale einführen, die fälschlicherweise als Rotationsbewegung interpretiert werden.

































































![[IMU-Beschleunigung messer + Neigung messer] HWT905-TTL MPU9250 IP67 wasserdicht Hochpräzise Beschleunigung + Gyroskop + Winkel + Magnetometer](http://s.alicdn.com/@sc04/kf/Hfde9f5c2182d4d5db6acc8f501b56cf8a.jpg_300x300.jpg)
![[IMU-Beschleunigung messer + Neigung messer] HWT905-TTL MPU9250 IP67 wasserdicht Hochpräzise Beschleunigung + Gyroskop + Winkel + Magnetometer](http://s.alicdn.com/@sc04/kf/Hff2597dbe4ad4ce48550de0bda77865et.jpg_300x300.jpg)
![[IMU-Beschleunigung messer + Neigung messer] HWT905-TTL MPU9250 IP67 wasserdicht Hochpräzise Beschleunigung + Gyroskop + Winkel + Magnetometer](http://s.alicdn.com/@sc04/kf/H6f083bc3ac8e4293bb94dcf283ba37b9N.jpg_300x300.jpg)
![[IMU-Beschleunigung messer + Neigung messer] HWT905-TTL MPU9250 IP67 wasserdicht Hochpräzise Beschleunigung + Gyroskop + Winkel + Magnetometer](http://s.alicdn.com/@sc04/kf/H145317063f204ebd9944c7f5fa4e0d0dc.jpg_300x300.jpg)
![[IMU-Beschleunigung messer + Neigung messer] HWT905-TTL MPU9250 IP67 wasserdicht Hochpräzise Beschleunigung + Gyroskop + Winkel + Magnetometer](http://s.alicdn.com/@sc04/kf/He8931bfac395416d8da44ed5531021c89.jpg_300x300.jpg)
![[IMU-Beschleunigung messer + Neigung messer] HWT905-TTL MPU9250 IP67 wasserdicht Hochpräzise Beschleunigung + Gyroskop + Winkel + Magnetometer](http://s.alicdn.com/@sc04/kf/H3c46433bebf244028782c1ea0d138148B.jpg_300x300.jpg)














































































































































 浙公网安备 33010002000092号
浙公网安备 33010002000092号 浙B2-20120091-4
浙B2-20120091-4